
Page 209 - Rock Mechanics For Underground Mining
P. 209
THE DISTINCT ELEMENT METHOD
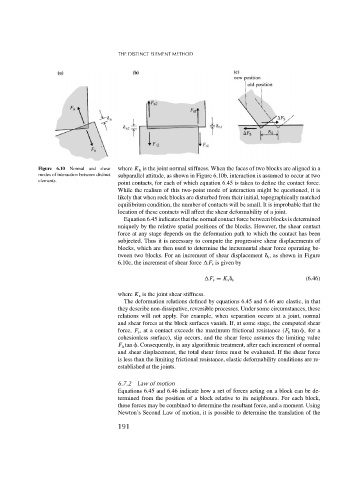
Figure 6.10 Normal and shear where K n is the joint normal stiffness. When the faces of two blocks are aligned in a
modes of interaction between distinct subparallel attitude, as shown in Figure 6.10b, interaction is assumed to occur at two
elements.
point contacts, for each of which equation 6.45 is taken to define the contact force.
While the realism of this two-point mode of interaction might be questioned, it is
likely that when rock blocks are disturbed from their initial, topographically matched
equilibrium condition, the number of contacts will be small. It is improbable that the
location of these contacts will affect the shear deformability of a joint.
Equation 6.45 indicates that the normal contact force between blocks is determined
uniquely by the relative spatial positions of the blocks. However, the shear contact
force at any stage depends on the deformation path to which the contact has been
subjected. Thus it is necessary to compute the progressive shear displacements of
blocks, which are then used to determine the incremental shear force operating be-
tween two blocks. For an increment of shear displacement s , as shown in Figure
6.10c, the increment of shear force F s is given by
(6.46)
F s = K s s
where K s is the joint shear stiffness.
The deformation relations defined by equations 6.45 and 6.46 are elastic, in that
they describe non-dissipative, reversible processes. Under some circumstances, these
relations will not apply. For example, when separation occurs at a joint, normal
and shear forces at the block surfaces vanish. If, at some stage, the computed shear
force, F s , at a contact exceeds the maximum frictional resistance (F n tan , for a
cohesionless surface), slip occurs, and the shear force assumes the limiting value
F n tan . Consequently, in any algorithmic treatment, after each increment of normal
and shear displacement, the total shear force must be evaluated. If the shear force
is less than the limiting frictional resistance, elastic deformability conditions are re-
established at the joints.
6.7.2 Law of motion
Equations 6.45 and 6.46 indicate how a set of forces acting on a block can be de-
termined from the position of a block relative to its neighbours. For each block,
these forces may be combined to determine the resultant force, and a moment. Using
Newton’s Second Law of motion, it is possible to determine the translation of the
191