
Page 355 - Satellite Communications, Fourth Edition
P. 355
Error Control Coding 335
Noisy signal Clean signal
.5V .7V –2V 1V 1V –1V
Hard
Optimum Threshold Binary 1
decision
demodulator detector output
decoder
Threshold
level 0V
(a)
Noisy signal
.5V .7V –2V
Soft
Optimum Binary 0
decision
demodulator decoder output
(b)
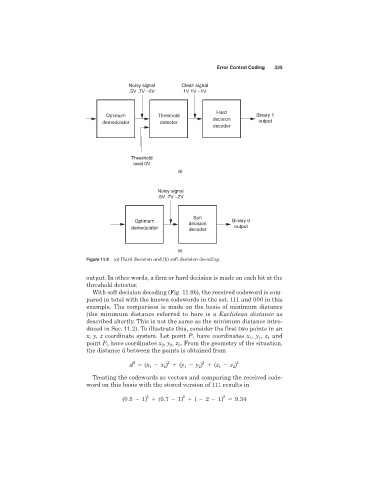
Figure 11.9 (a) Hard decision and (b) soft decision decoding.
output. In other words, a firm or hard decision is made on each bit at the
threshold detector.
With soft decision decoding (Fig. 11.9b), the received codeword is com-
pared in total with the known codewords in the set, 111 and 000 in this
example. The comparison is made on the basis of minimum distance
(the minimum distance referred to here is a Euclidean distance as
described shortly. This is not the same as the minimum distance intro-
duced in Sec. 11.2). To illustrate this, consider the first two points in an
x, y, z coordinate system. Let point P have coordinates x , y , z and
1
1
1
1
point P have coordinates x , y , z . From the geometry of the situation,
2
2
2
2
the distance d between the points is obtained from
2 2 2 2
d (x x ) (y y ) (z z )
2
1
1
1
2
2
Treating the codewords as vectors and comparing the received code-
word on this basis with the stored version of 111 results in
2
2
2
(0.5 1) (0.7 1) ( 2 1) 9.34