
Page 111 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 111
LINEAR TIME-INVARIANT SYSTEMS [CHAP. 2
(a) Since h[n] = 0 for n < 0, the system is causal.
(b) Using Eq. (1.91) (Prob. 1,191, we have
Therefore, the system is BIB0 stable if la1 < 1 and unstable if la1 2 1.
SYSTEMS DESCRIBED BY DIFFERENCE EQUATIONS
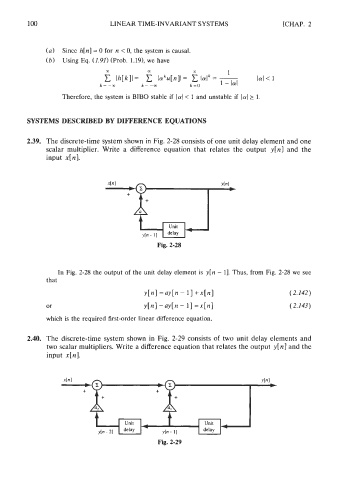
239. The discrete-time system shown in Fig. 2-28 consists of one unit delay element and one
scalar multiplier. Write a difference equation that relates the output y[n] and the
input x[n].
YI~I
Fig. 2-28
In Fig. 2-28 the output of the unit delay element is y[n - 11. Thus, from Fig. 2-28 we see
that
which is the required first-order linear difference equation.
2.40. The discrete-time system shown in Fig. 2-29 consists of two unit delay elements and
two scalar multipliers. Write a difference equation that relates the output y[n] and the
input x[n].
~Inl
Fig. 2-29