
Page 159 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 159
148 LAPLACE TRANSFORM AND CONTINUOUS-TIME LTI SYSTEMS [CHAP. 3
-
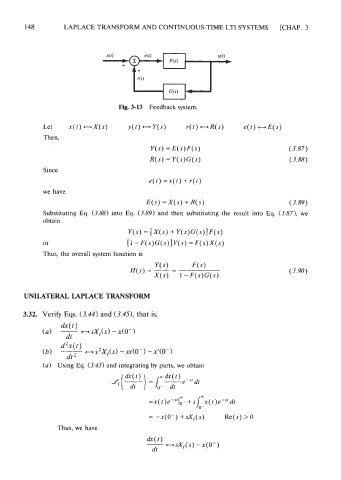
Fig. 3-13 Feedback system.
Let
Then,
Y(s) = E(s) F(s) (3.87)
R(s) = Y(s)G(s) (3.88)
Since
e(t) =x(t) +r(t)
we have
E(s) = X(s) + R(s) (3.89)
Substituting Eq. (3.88) into Eq. (3.89) and then substituting the result into Eq. (3.87), we
obtain
Y(s) = [X(s) + Y(s)G(s)lF(s)
or [l - ~(s)G(s)] ~(s) F(s) X(s)
=
Thus, the overall system function is
UNILATERAL LAPLACE TRANSFORM
3.32. Verify Eqs. (3.44) and (3.45), that is,
d-41)
(a) - sXI(s) -x(O-)
H
dl
(a) Using Eq. (3.43) and integrating by parts, we obtain
Thus, we have