
Page 193 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 193
THE z-TRANSFORM AND DISCRETE-TIME LTI SYSTEMS [CHAP. 4
(a) From Table 4-1
We see that the ROCs in Eqs. (4.58) and (4.59) overlap, and thus,
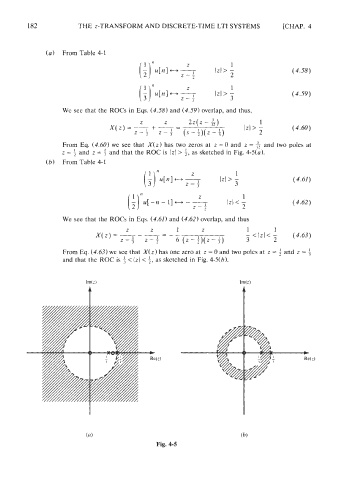
From Eq. (4.60) we see that X(z) has two zeros at z = 0 and z = & and two poles at
z = and z = and that the ROC is lzl > 4, as sketched in Fig. 4-5(a).
(b) From Table 4-1
We see that the ROCs in Eqs. (4.61) and (4.62) overlap, and thus
From Eq. (4.63) we see that X(z) has one zero at z = 0 and two poles at z = $ and z = 4
and that the ROC is 3 < lzl< :, as sketched in Fig. 4-5(b).
Fig. 4-5