
Page 95 - Schaum's Outline of Theory and Problems of Signals and Systems
P. 95
LINEAR TIME-INVARIANT SYSTEMS [CHAP. 2
Next, from Fig. 2-18 the input e(t) to the integrator is given by
e(t) =x(t) -ay(t)
Substituting Eq. (2.96) into Eq. (2.95), we get
which is the required first-order linear differential equation.
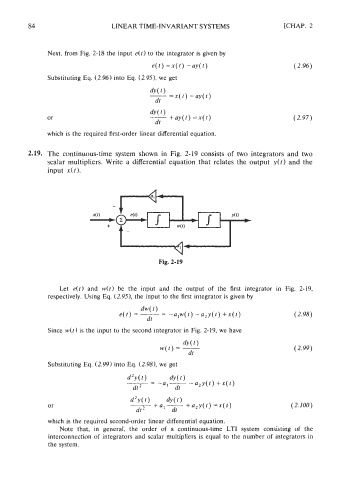
2.19. The continuous-time system shown in Fig. 2-19 consists of two integrators and two
scalar multipliers. Write a differential equation that relates the output y(t) and the
input x( t ).
Fig. 2-19
Let e(0 and w(t) be the input and the output of the first integrator in Fig. 2-19,
respectively. Using Eq. (2.951, the input to the first integrator is given by
Since w(t) is the input to the second integrator in Fig. 2-19, we have
Substituting Eq. (2.99) into Eq. (2.98), we get
which is the required second-order linear differential equation.
Note that, in general, the order of a continuous-time LTI system consisting of the
interconnection of integrators and scalar multipliers is equal to the number of integrators in
the system.