
Page 233 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 233
208 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
1
q 2 = 0
L 2
7 10 11
T
2 H 2 12 9
5 8
L 1
q 1 = 0
4
H 1 6
3
S
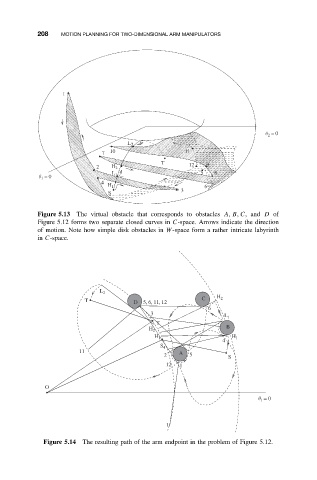
Figure 5.13 The virtual obstacle that corresponds to obstacles A, B, C,and D of
Figure 5.12 forms two separate closed curves in C-space. Arrows indicate the direction
of motion. Note how simple disk obstacles in W-space form a rather intricate labyrinth
in C-space.
L 2
C H 2
T D 5, 6, 11, 12
6
3
L 1
T
B
H 2
H 1 H 1
4
S 4
11 A
2 5 S
12 1
O
q 1 = 0
1
Figure 5.14 The resulting path of the arm endpoint in the problem of Figure 5.12.