
Page 238 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 238
PLANAR REVOLUTE–REVOLUTE (RR) ARM 213
B
S
l 2 A
1
3 1 S
2
4 2
3
l 1
C T
8 D
5
O
4
7
6
T
8
7
5
6
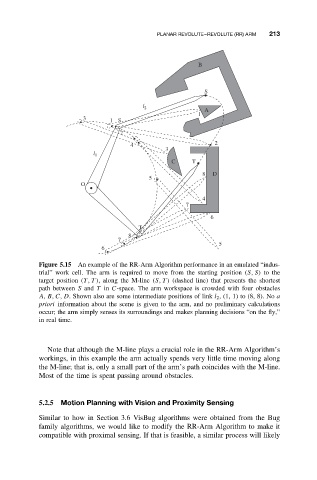
Figure 5.15 An example of the RR-Arm Algorithm performance in an emulated “indus-
trial” work cell. The arm is required to move from the starting position (S, S) to the
target position (T, T ), along the M-line (S, T ) (dashed line) that presents the shortest
path between S and T in C-space. The arm workspace is crowded with four obstacles
A, B, C, D. Shown also are some intermediate positions of link l 2 , (1, 1) to (8, 8). No a
priori information about the scene is given to the arm, and no preliminary calculations
occur; the arm simply senses its surroundings and makes planning decisions “on the fly,”
in real time.
Note that although the M-line plays a crucial role in the RR-Arm Algorithm’s
workings, in this example the arm actually spends very little time moving along
the M-line; that is, only a small part of the arm’s path coincides with the M-line.
Most of the time is spent passing around obstacles.
5.2.5 Motion Planning with Vision and Proximity Sensing
Similar to how in Section 3.6 VisBug algorithms were obtained from the Bug
family algorithms, we would like to modify the RR-Arm Algorithm to make it
compatible with proximal sensing. If that is feasible, a similar process will likely