
Page 243 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 243
218 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
S T
S T
(a) (b)
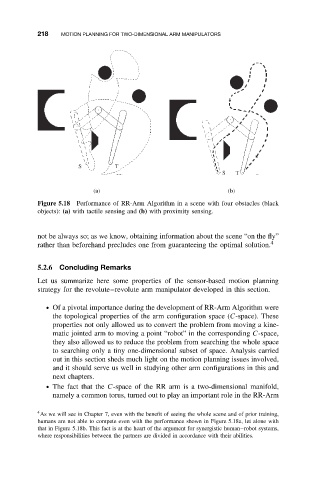
Figure 5.18 Performance of RR-Arm Algorithm in a scene with four obstacles (black
objects): (a) with tactile sensing and (b) with proximity sensing.
not be always so; as we know, obtaining information about the scene “on the fly”
rather than beforehand precludes one from guaranteeing the optimal solution. 4
5.2.6 Concluding Remarks
Let us summarize here some properties of the sensor-based motion planning
strategy for the revolute–revolute arm manipulator developed in this section.
• Of a pivotal importance during the development of RR-Arm Algorithm were
the topological properties of the arm configuration space (C-space). These
properties not only allowed us to convert the problem from moving a kine-
matic jointed arm to moving a point “robot” in the corresponding C-space,
they also allowed us to reduce the problem from searching the whole space
to searching only a tiny one-dimensional subset of space. Analysis carried
out in this section sheds much light on the motion planning issues involved,
and it should serve us well in studying other arm configurations in this and
next chapters.
• The fact that the C-space of the RR arm is a two-dimensional manifold,
namely a common torus, turned out to play an important role in the RR-Arm
4 As we will see in Chapter 7, even with the benefit of seeing the whole scene and of prior training,
humans are not able to compete even with the performance shown in Figure 5.18a, let alone with
that in Figure 5.18b. This fact is at the heart of the argument for synergistic human–robot systems,
where responsibilities between the partners are divided in accordance with their abilities.