
Page 241 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 241
216 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
the sensing range will be a complex figure (Figure 5.16) that surrounds the arm
and changes its shape as the arm links move relative to each other.
In C-space the situation is somewhat closer to the mobile robot sensing range
simply because in C-space the arm becomes a point. But that’s where the simi-
larity stops. Assume that the arm’s sensing allows it to sense objects in W-space
within some sensing range r (Figure 5.16). An obstacle will be detected when it
is at a distance equal to or smaller than r from the point on the arm body closest
to it.
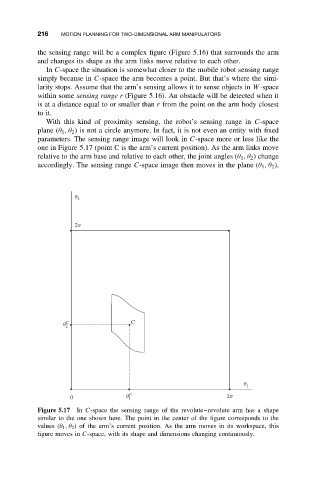
With this kind of proximity sensing, the robot’s sensing range in C-space
plane (θ 1 ,θ 2 ) is not a circle anymore. In fact, it is not even an entity with fixed
parameters. The sensing range image will look in C-space more or less like the
one in Figure 5.17 (point C is the arm’s current position). As the arm links move
relative to the arm base and relative to each other, the joint angles (θ 1 ,θ 2 ) change
accordingly. The sensing range C-space image then moves in the plane (θ 1 ,θ 2 ),
q 2
2p
q 2 C C
q 1
0 q C 1 2p
Figure 5.17 In C-space the sensing range of the revolute–revolute arm has a shape
similar to the one shown here. The point in the center of the figure corresponds to the
values (θ 1 ,θ 2 ) of the arm’s current position. As the arm moves in its workspace, this
figure moves in C-space, with its shape and dimensions changing continuously.