
Page 239 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 239
214 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
work for other arm manipulator configurations. The process is not as straight-
forward as with the Bug algorithms, both on the sensing hardware level and on
the algorithmic level.
Hardware. Let us consider briefly the sensing hardware requirements. (More
will be said on this in Chapter 8, which is fully devoted to the issues of sens-
ing hardware for arm manipulators.) Recall (see Section 3.6) that the primary
requirement to the arm sensing is to functionally cover the whole body of the
arm, so that no obstacle approaching any point of the arm body would go unde-
tected. Tactile sensing, which was assumed for the arm in this section, satisfies
this requirement. Less satisfactory, however, is tactile sensing’s inability to han-
dle system dynamics. Being made from hard unyielding materials, today’s robot
arm manipulators are quite heavy. Touching an object while moving creates sig-
nificant instantaneous forces and accelerations, which can easily hurt the robot
and the object that it touches. This is less so at the robot hand, where special
measures can be taken to handle contact, but very much so at the rest of the robot
body. Humans and animals are less vulnerable to such encounters because the
soft muscle and fat tissues under their skin produce a softening “braking” effect.
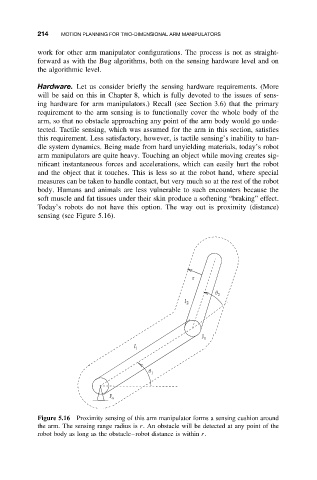
Today’s robots do not have this option. The way out is proximity (distance)
sensing (see Figure 5.16).
r
q 2
l 2
J 1
l 1
q 1
J o
Figure 5.16 Proximity sensing of this arm manipulator forms a sensing cushion around
the arm. The sensing range radius is r. An obstacle will be detected at any point of the
robot body as long as the obstacle–robot distance is within r.