
Page 248 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 248
DISTINCT KINEMATIC CONFIGURATIONS OF RR ARM 223
z b
S
l 2
y
q 2
T
J 2
a
q 2
q 1
x
J 1
q 1
(a)
z
T z y
T
M 1 S z
M 2 S x
S T y T x X
M 4 S y
+
q 1
−
q 1
M 3 +
q 2
−
q 2
(b)
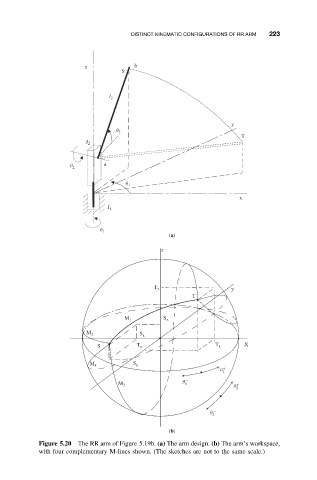
Figure 5.20 The RR arm of Figure 5.19b. (a) The arm design. (b) The arm’s workspace,
with four complementary M-lines shown. (The sketches are not to the same scale.)