
Page 250 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 250
DISTINCT KINEMATIC CONFIGURATIONS OF RR ARM 225
P y
z
l 2
q 2
q 2 y
l 1
a P y
q 1
x
P x
q 1
(a)
z
y
l 2
D q 2
l 2
l 1 q 2
l 1
q 1
x
q 1
(b)
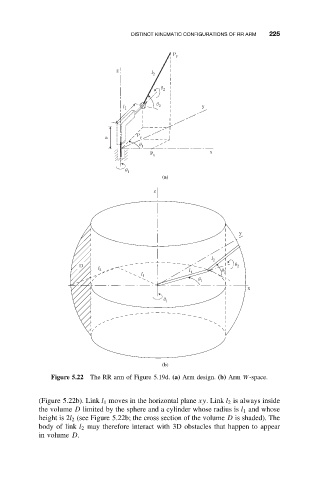
Figure 5.22 The RR arm of Figure 5.19d. (a) Arm design. (b) Arm W-space.
(Figure 5.22b). Link l 1 moves in the horizontal plane xy.Link l 2 is always inside
the volume D limited by the sphere and a cylinder whose radius is l 1 and whose
height is 2l 2 (see Figure 5.22b; the cross section of the volume D is shaded). The
body of link l 2 may therefore interact with 3D obstacles that happen to appear
in volume D.