
Page 249 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 249
224 MOTION PLANNING FOR TWO-DIMENSIONAL ARM MANIPULATORS
S
z
l 2
q 2
y
q 2
T
l 1
a
q 1
x
J 1
(a)
q 1
y y
l 2 − l 1
l 1
l 1
x
x
l 1 + l 2
l 1 + l 2
l 2 > l 1
l 2 < l 1
z
z
l 2
x l 2
l 1 (y)
x
(y)
l 1
(c)
(b)
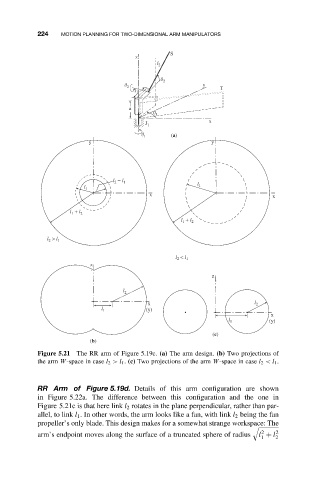
Figure 5.21 The RR arm of Figure 5.19c. (a) The arm design. (b) Two projections of
the arm W-space in case l 2 >l 1 . (c) Two projections of the arm W-space in case l 2 <l 1 .
RR Arm of Figure 5.19d. Details of this arm configuration are shown
in Figure 5.22a. The difference between this configuration and the one in
Figure 5.21c is that here link l 2 rotates in the plane perpendicular, rather than par-
allel, to link l 1 . In other words, the arm looks like a fan, with link l 2 being the fan
propeller’s only blade. This design makes for a somewhat strange workspace: The
2
arm’s endpoint moves along the surface of a truncated sphere of radius l + l 2
1 2