
Page 314 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 314
THE CASE OF THE PPP (CARTESIAN) ARM 289
the arm due to an obstacle interference, then no position (l ,l ,l ), such that
1 2 3
l <l and l ∈ [0,l 3 max ], can be reached either.
2 2 3
In terms of decision-making, this case is similar to the one above, except that
the direction of obstacle monotonicity along l 2 axis reverses, and the choice of
the current local direction at a hit point H obeys a slightly different rule:
Rule 2:
If l 1 H >l 1 T , the current direction is “right.”
If l 1 H <l 1 T , the current direction is “left.”
If l 1 H = l 1 T , the target cannot be reached.
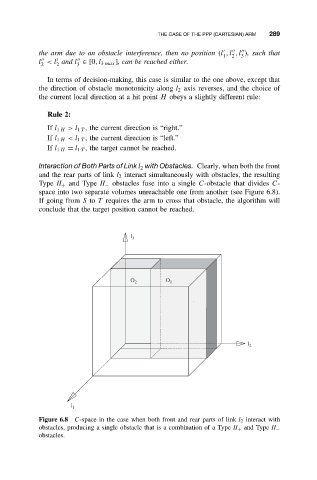
Interaction of Both Parts of Link l 2 with Obstacles. Clearly, when both the front
and the rear parts of link l 2 interact simultaneously with obstacles, the resulting
Type II + and Type II − obstacles fuse into a single C-obstacle that divides C-
space into two separate volumes unreachable one from another (see Figure 6.8).
If going from S to T requires the arm to cross that obstacle, the algorithm will
conclude that the target position cannot be reached.
l 3
O 2 O 1
l 2
l 1
Figure 6.8 C-space in the case when both front and rear parts of link l 2 interact with
obstacles, producing a single obstacle that is a combination of a Type II + and Type II −
obstacles.