
Page 316 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 316
THE CASE OF THE PPP (CARTESIAN) ARM 291
l 3
T
c
V-plane O 1
o a l
T′ 2
b c′
S b′
a′
S′
l 1
(a)
l 3
V-plane
T
O 1
c
o T′ l
a 2
c′
L
S
b
H
S′
l 1 (b)
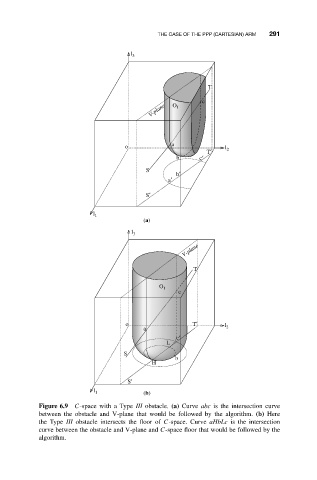
Figure 6.9 C-space with a Type III obstacle. (a) Curve abc is the intersection curve
between the obstacle and V-plane that would be followed by the algorithm. (b) Here
the Type III obstacle intersects the floor of C-space. Curve aHbLc is the intersection
curve between the obstacle and V-plane and C-space floor that would be followed by the
algorithm.