
Page 324 - Sensing, Intelligence, Motion : How Robots and Humans Move in an Unstructured World
P. 324
THE CASE OF THE PPP (CARTESIAN) ARM 299
I 3
j i
O 1
h T
g
f e
H 2
c
O 3
L b d
o 1 I
H 1 L 2 T′ 2
S a O 2
e′
k
L′ 2
m b′ H′ 2
c′ d′
H′ 1 L 1 ′
a′
V-plane S′
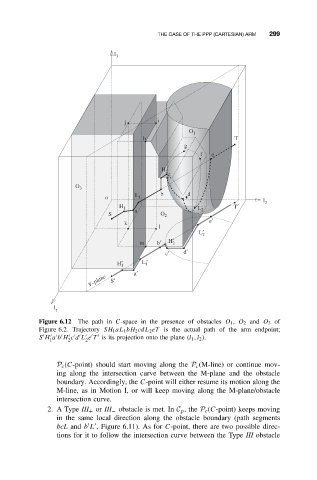
Figure 6.12 The path in C-space in the presence of obstacles O 1 , O 2 and O 3 of
Figure 6.2. Trajectory SH 1 aL 1 bH 2 cdL 2 eT is the actual path of the arm endpoint;
S H a b H c d L e T is its projection onto the plane (l 1 ,l 2 ).
1 2 2
P c (C-point) should start moving along the P c (M-line) or continue mov-
ing along the intersection curve between the M-plane and the obstacle
boundary. Accordingly, the C-point will either resume its motion along the
M-line, as in Motion I, or will keep moving along the M-plane/obstacle
intersection curve.
2. A Type III + or III − obstacle is met. In C p ,the P c (C-point) keeps moving
in the same local direction along the obstacle boundary (path segments
bcL and b L , Figure 6.11). As for C-point, there are two possible direc-
tions for it to follow the intersection curve between the Type III obstacle