
Page 106 - Sensors and Control Systems in Manufacturing
P. 106
Classification and Types of Sensors
2.6.2 Inductive Proximity Sensing Range 67
The sensing range of an inductive proximity sensor refers to the dis-
tance between the sensor face and the target. It also includes the shape
of the sensing field generated through the coil and core. Several
mechanical and environmental factors affect the sensing range, such
as those shown in the following table.
Mechanical Factors Environmental Factors
Core size Ambient temperature
Core shield Surrounding electrical conditions
Target material Surrounding mechanical conditions
Target size Variation between devices
Target shape
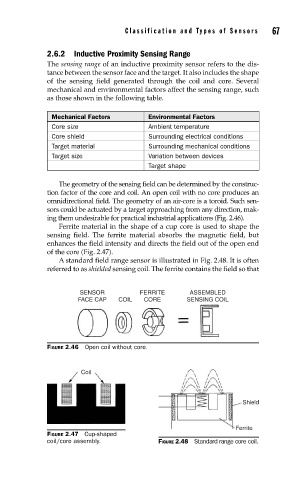
The geometry of the sensing field can be determined by the construc-
tion factor of the core and coil. An open coil with no core produces an
omnidirectional field. The geometry of an air-core is a toroid. Such sen-
sors could be actuated by a target approaching from any direction, mak-
ing them undesirable for practical industrial applications (Fig. 2.46).
Ferrite material in the shape of a cup core is used to shape the
sensing field. The ferrite material absorbs the magnetic field, but
enhances the field intensity and directs the field out of the open end
of the core (Fig. 2.47).
A standard field range sensor is illustrated in Fig. 2.48. It is often
referred to as shielded sensing coil. The ferrite contains the field so that
SENSOR FERRITE ASSEMBLED
FACE CAP COIL CORE SENSING COIL
FIGURE 2.46 Open coil without core.
Coil
Shield
Ferrite
FIGURE 2.47 Cup-shaped
coil/core assembly. FIGURE 2.48 Standard range core coil.