
Page 193 - Shigley's Mechanical Engineering Design
P. 193
bud29281_ch04_147-211.qxd 12/10/2009 10:20 pm Page 168 pinnacle s-171:Desktop Folder:Temp Work:Don't Delete (Jobs):MHDQ196/Budynas:
168 Mechanical Engineering Design
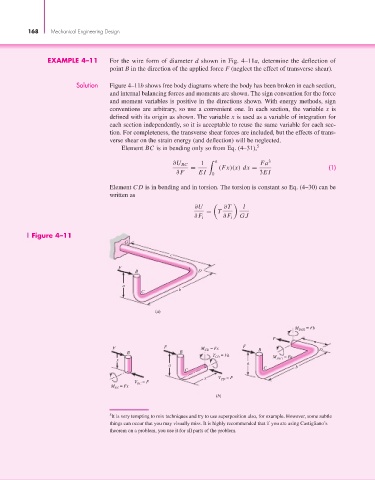
EXAMPLE 4–11 For the wire form of diameter d shown in Fig. 4–11a, determine the deflection of
point B in the direction of the applied force F (neglect the effect of transverse shear).
Solution Figure 4–11b shows free body diagrams where the body has been broken in each section,
and internal balancing forces and moments are shown. The sign convention for the force
and moment variables is positive in the directions shown. With energy methods, sign
conventions are arbitrary, so use a convenient one. In each section, the variable x is
defined with its origin as shown. The variable x is used as a variable of integration for
each section independently, so it is acceptable to reuse the same variable for each sec-
tion. For completeness, the transverse shear forces are included, but the effects of trans-
verse shear on the strain energy (and deflection) will be neglected.
Element BC is in bending only so from Eq. (4–31), 5
∂U BC 1 a Fa 3
= (Fx)(x) dx = (1)
∂F EI 0 3EI
Element CD is in bending and in torsion. The torsion is constant so Eq. (4–30) can be
written as
∂U ∂T l
= T
∂F i ∂F i GJ
Figure 4–11
G
c
F
B D
a
b
C
(a)
= Fb
M DG2
F
x
F F M CD = Fx F B D
B B
T CD = Fa = Fa
x M DG1
a a b
C C
x V = F
CD
V = F
BC
M = Fx
BC
(b)
5 It is very tempting to mix techniques and try to use superposition also, for example. However, some subtle
things can occur that you may visually miss. It is highly recommended that if you are using Castigliano’s
theorem on a problem, you use it for all parts of the problem.