
Page 146 - Socially Intelligent Agents Creating Relationships with Computers and Robots
P. 146
Mobile Robotic Toys and Autism 129
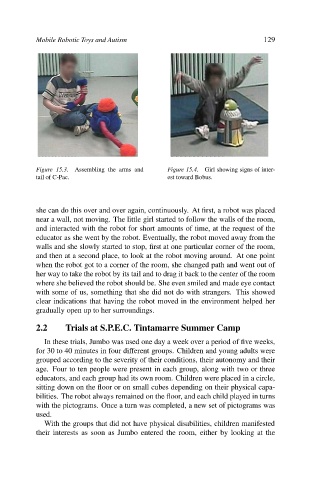
Figure 15.3. Assembling the arms and Figure 15.4. Girl showing signs of inter-
tail of C-Pac. est toward Bobus.
she can do this over and over again, continuously. At first, a robot was placed
near a wall, not moving. The little girl started to follow the walls of the room,
and interacted with the robot for short amounts of time, at the request of the
educator as she went by the robot. Eventually, the robot moved away from the
walls and she slowly started to stop, first at one particular corner of the room,
and then at a second place, to look at the robot moving around. At one point
when the robot got to a corner of the room, she changed path and went out of
her way to take the robot by its tail and to drag it back to the center of the room
where she believed the robot should be. She even smiled and made eye contact
with some of us, something that she did not do with strangers. This showed
clear indications that having the robot moved in the environment helped her
gradually open up to her surroundings.
2.2 Trials at S.P.E.C. Tintamarre Summer Camp
In these trials, Jumbo was used one day a week over a period of five weeks,
for 30 to 40 minutes in four different groups. Children and young adults were
grouped according to the severity of their conditions, their autonomy and their
age. Four to ten people were present in each group, along with two or three
educators, and each group had its own room. Children were placed in a circle,
sitting down on the floor or on small cubes depending on their physical capa-
bilities. The robot always remained on the floor, and each child played in turns
with the pictograms. Once a turn was completed, a new set of pictograms was
used.
With the groups that did not have physical disabilities, children manifested
their interests as soon as Jumbo entered the room, either by looking at the