
Page 392 - The Mechatronics Handbook
P. 392
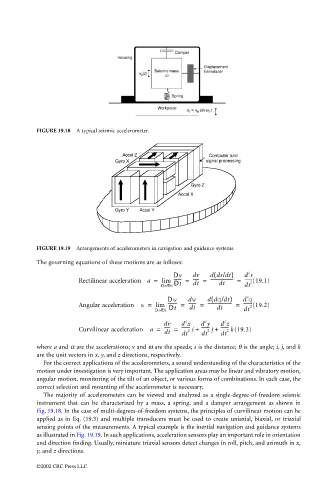
FIGURE 19.18 A typical seismic accelerometer.
Accel Z Computer and
Gyro X signal processing
Gyro Z
Accel X
Gyro Y Accel Y
FIGURE 19.19 Arrangements of accelerometers in navigation and guidance systems.
The governing equations of these motions are as follows:
2
(
Dv dv dds/dt) d s
Rectilinear acceleration a = lim ------- = ----- = --------------------- = ------- 2 (19.1)
DtÆ0 Dt dt dt dt
2
(
Dw dw ddq/dt) d q
Angular acceleration a = lim -------- = ------- = ---------------------- = -------- 2 (19.2)
dt
dt
DtÆ0 Dt dt
2
2
2
dv d x d y d z
Curvilinear acceleration a = ----- = -------- 2 i + ------- 2 j + ------- 2 k (19.3)
dt dt dt dt
where a and α are the accelerations; v and ω are the speeds; s is the distance; θ is the angle; i, j, and k
are the unit vectors in x, y, and z directions, respectively.
For the correct applications of the accelerometers, a sound understanding of the characteristics of the
motion under investigation is very important. The application areas may be linear and vibratory motion,
angular motion, monitoring of the tilt of an object, or various forms of combinations. In each case, the
correct selection and mounting of the accelerometer is necessary.
The majority of accelerometers can be viewed and analyzed as a single-degree-of-freedom seismic
instrument that can be characterized by a mass, a spring, and a damper arrangement as shown in
Fig. 19.18. In the case of multi-degrees-of-freedom systems, the principles of curvilinear motion can be
applied as in Eq. (19.3) and multiple transducers must be used to create uniaxial, biaxial, or triaxial
sensing points of the measurements. A typical example is the inertial navigation and guidance systems
as illustrated in Fig. 19.19. In such applications, acceleration sensors play an important role in orientation
and direction finding. Usually, miniature triaxial sensors detect changes in roll, pitch, and azimuth in x,
y, and z directions.
©2002 CRC Press LLC