
Page 71 - Understanding Automotive Electronics
P. 71
2735 | CH 2 Page 58 Tuesday, March 10, 1998 10:55 AM
2 THE SYSTEMS APPROACH TO CONTROL AND INSTRUMENTATION
controller input and the desired plant output is called the control law for the
system. The desired value for the plant output is often called the set point.
The behavior of the plant is influenced electronically by means of an
electromechanical device called an actuator. Looking ahead to our discussion of
automotive electronics, a specific actuator will be introduced, namely, an
electrically activated fuel injector. Generally speaking, an actuator has input
electrical terminals that receive electrical power from the control electronics. By
a process of internal electromechanical energy conversion, a mechanical output
is obtained that operates to control the plant. In the case of the fuel injector, the
air–fuel mixture is controlled, which, in turn, controls the engine output.
Although electronic controllers can, in principle, be implemented with
either analog or digital electronics, the trend in automotive control is digital. Since
the purpose of this chapter is to discuss fundamentals of electronic systems, both
continuous-time (analog) and discrete-time (digital) control systems are presented.
There are two major categories of control systems: open-loop (or
feedforward) and closed-loop (or feedback) systems. There are many
automotive examples of each, as we will show in later chapters. The architecture
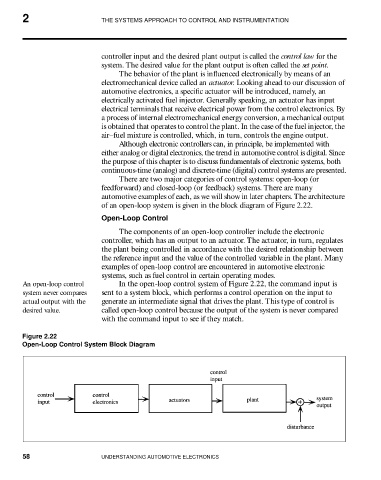
of an open-loop system is given in the block diagram of Figure 2.22.
Open-Loop Control
The components of an open-loop controller include the electronic
controller, which has an output to an actuator. The actuator, in turn, regulates
the plant being controlled in accordance with the desired relationship between
the reference input and the value of the controlled variable in the plant. Many
examples of open-loop control are encountered in automotive electronic
systems, such as fuel control in certain operating modes.
An open-loop control In the open-loop control system of Figure 2.22, the command input is
system never compares sent to a system block, which performs a control operation on the input to
actual output with the generate an intermediate signal that drives the plant. This type of control is
desired value. called open-loop control because the output of the system is never compared
with the command input to see if they match.
Figure 2.22
Open-Loop Control System Block Diagram
58 UNDERSTANDING AUTOMOTIVE ELECTRONICS