
Page 144 - Welding Robots Technology, System Issues, and Applications
P. 144
Robotic Welding: System Issues 131
The client program implements calls to the TCP/IP server program defined above,
using the Microsoft Winsock2 implementation, and was written to be a very simple
example. A few software buttons were added to the client program to perform
certain operations, but with this program the user can also write the full instruction
in the command window, send it to the robot and receive the answer in the output
window. To demonstrate the effort involved in sending commands and receiving
answers, the following (Figure 4.14) shows the code associated with some of the
software buttons.
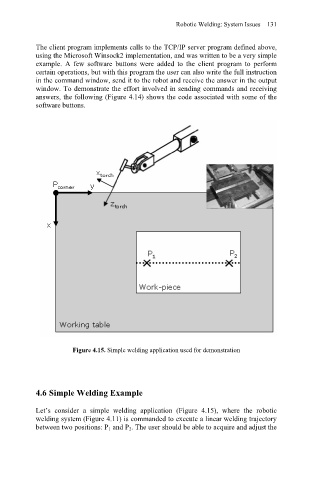
Figure 4.15. Simple welding application used for demonstration
4.6 Simple Welding Example
Let’s consider a simple welding application (Figure 4.15), where the robotic
welding system (Figure 4.11) is commanded to execute a linear welding trajectory
between two positions: P 1 and P 2. The user should be able to acquire and adjust the