
Page 177 - Welding Robots Technology, System Issues, and Applications
P. 177
Read actual robot position/orientation: Robotic Welding: Application Examples 165
pcrob.ReadCurrRobTarget(result, channel);
where result is again a data structure of the appropriate type to hold a robtarget
position/orientation structure [9][10].
The process of accessing information from the robot controller and from the loaded
program modules is thus very simple, namely because the necessary data structures
are available from the above-mentioned software component. For example, the
code associated with the software button “Read RobT” of the application
“WeldPanel” (Figure 5.7) is represented in Figure 5.13.
CString msg;
float value = 9301;
nresult = m_pon.WriteNum(LPCTSTR("decision1"),&value);
msg.Format("Error: %d",nresult);
if (nresult != 0) AfxMessageBox(msg);
CString msg;
float value = 9401;
nresult = m_pon.WriteNum(LPCTSTR("decision1"),&value);
msg.Format("Error: %d",nresult);
if (nresult != 0) AfxMessageBox(msg);
startweld=1;
Sleep(100);
nresult = m_pon.ReadNum(LPCTSTR("weldpoint"),&value);
msg.Format("Error: %d",nresult);
CString msg;
float value = 123;
nresult = m_pon.WriteNum(LPCTSTR("decision1"),&value);
msg.Format("Error: %d",nresult);
if (nresult != 0) AfxMessageBox(msg);
startweld=0;
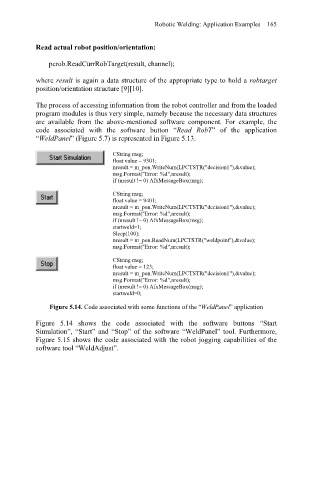
Figure 5.14. Code associated with some functions of the “WeldPanel” application
Figure 5.14 shows the code associated with the software buttons “Start
Simulation”, “Start” and “Stop” of the software “WeldPanel” tool. Furthermore,
Figure 5.15 shows the code associated with the robot jogging capabilities of the
software tool “WeldAdjust”.