
Page 179 - Welding Robots Technology, System Issues, and Applications
P. 179
Robotic Welding: Application Examples 167
5.4.2 Software Components
Using software components is an interesting solution, because it simplifies the use
of certain features hiding the tricky details from the advanced user. Furthermore,
using “visual” components is also desirable, since they integrate well with the
available component containers. If the operating system is based on the Distributed
COM technology (DCOM), then ActiveX components are one of the obvious
solutions.
5.4.3 CAD Interface
Actual CAD software packages are powerful 3D tools, very common among
manufacturing companies. These packages are so popular that it’s fair to say that
almost every product manufactured in modern countries is designed using some
type of CAD software package. Consequently, using those tools for robot
programming is desirable, namely on robotic welding applications, since the
operator may start the off-line programming of the necessary operations using the
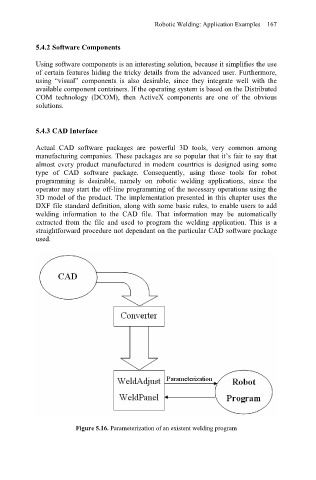
3D model of the product. The implementation presented in this chapter uses the
DXF file standard definition, along with some basic rules, to enable users to add
welding information to the CAD file. That information may be automatically
extracted from the file and used to program the welding application. This is a
straightforward procedure not dependant on the particular CAD software package
used.
Figure 5.16. Parameterization of an existent welding program