
Page 174 - Welding Robots Technology, System Issues, and Applications
P. 174
162 Welding Robots
a
b
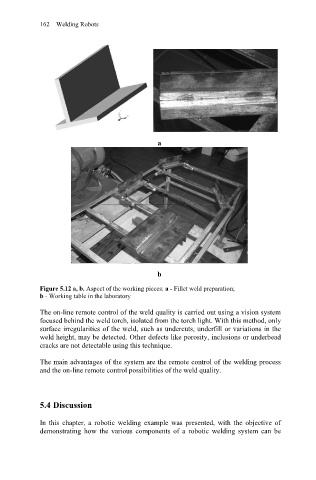
Figure 5.12 a, b. Aspect of the working pieces: a - Fillet weld preparation;
b - Working table in the laboratory
The on-line remote control of the weld quality is carried out using a vision system
focused behind the weld torch, isolated from the torch light. With this method, only
surface irregularities of the weld, such as undercuts, underfill or variations in the
weld height, may be detected. Other defects like porosity, inclusions or underbead
cracks are not detectable using this technique.
The main advantages of the system are the remote control of the welding process
and the on-line remote control possibilities of the weld quality.
5.4 Discussion
In this chapter, a robotic welding example was presented, with the objective of
demonstrating how the various components of a robotic welding system can be