
Page 175 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 175
APPC of Strict-Feedback Systems With Non-linear Dead-Zone 171
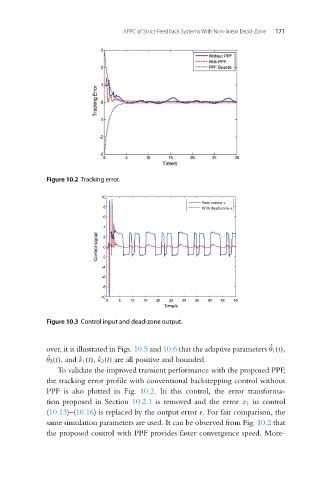
Figure 10.2 Tracking error.
Figure 10.3 Control input and dead-zone output.
ˆ
over, it is illustrated in Figs. 10.5 and 10.6 that the adaptive parameters θ 1 (t),
θ 2 (t),and ˆε 1 (t), ˆε 2 (t) are all positive and bounded.
ˆ
To validate the improved transient performance with the proposed PPF,
the tracking error profile with conventional backstepping control without
PPF is also plotted in Fig. 10.2. In this control, the error transforma-
tion proposed in Section 10.2.1 is removed and the error z 1 in control
(10.13)–(10.16) is replaced by the output error e. For fair comparison, the
same simulation parameters are used. It can be observed from Fig. 10.2 that
the proposed control with PPF provides faster convergence speed. More-