
Page 176 - Adaptive Identification and Control of Uncertain Systems with Nonsmooth Dynamics
P. 176
172 Adaptive Identification and Control of Uncertain Systems with Non-smooth Dynamics
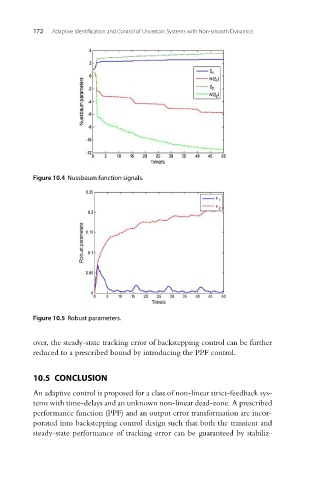
Figure 10.4 Nussbaum function signals.
Figure 10.5 Robust parameters.
over, the steady-state tracking error of backstepping control can be further
reduced to a prescribed bound by introducing the PPF control.
10.5 CONCLUSION
An adaptive control is proposed for a class of non-linear strict-feedback sys-
tems with time-delays and an unknown non-linear dead-zone. A prescribed
performance function (PPF) and an output error transformation are incor-
porated into backstepping control design such that both the transient and
steady-state performance of tracking error can be guaranteed by stabiliz-