
Page 112 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 112
Amphibionics 04 3/24/03 8:24 AM Page 91
Chapter 4 / Frogbotic: Build Your Own Robotic Frog
Leg Position Sensors
The leg position sensors are limit switches that will determine
when the legs are set to their jumping position, at which point the
spring mechanism is fully loaded. This information will be used by
the microcontroller to coordinate the legs for jumping. To attach
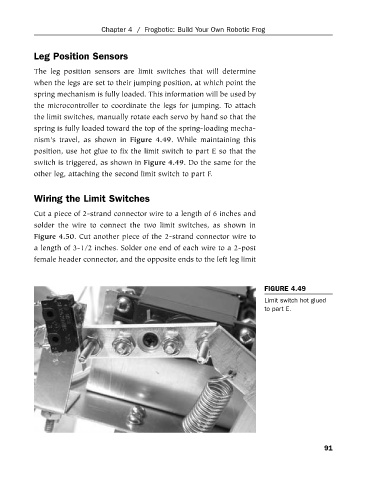
the limit switches, manually rotate each servo by hand so that the
spring is fully loaded toward the top of the spring-loading mecha-
nism’s travel, as shown in Figure 4.49. While maintaining this
position, use hot glue to fix the limit switch to part E so that the
switch is triggered, as shown in Figure 4.49. Do the same for the
other leg, attaching the second limit switch to part F.
Wiring the Limit Switches
Cut a piece of 2-strand connector wire to a length of 6 inches and
solder the wire to connect the two limit switches, as shown in
Figure 4.50. Cut another piece of the 2-strand connector wire to
a length of 3-1/2 inches. Solder one end of each wire to a 2-post
female header connector, and the opposite ends to the left leg limit
FIGURE 4.49
Limit switch hot glued
to part E.
91