
Page 260 - Amphibionics : Build Your Own Biologically Inspired Robot
P. 260
Amphibionics 06 3/24/03 9:02 AM Page 239
Chapter 6 / Crocobot: Build Your Own Robotic Crocodile
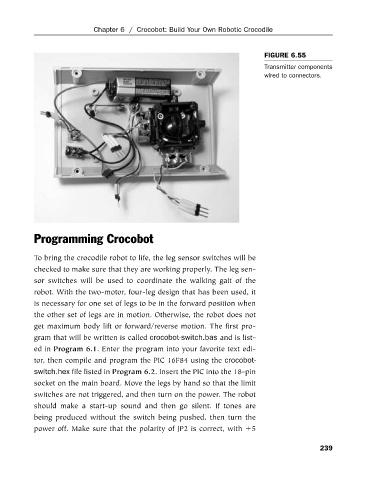
FIGURE 6.55
Transmitter components
wired to connectors.
Programming Crocobot
To bring the crocodile robot to life, the leg sensor switches will be
checked to make sure that they are working properly. The leg sen-
sor switches will be used to coordinate the walking gait of the
robot. With the two-motor, four-leg design that has been used, it
is necessary for one set of legs to be in the forward position when
the other set of legs are in motion. Otherwise, the robot does not
get maximum body lift or forward/reverse motion. The first pro-
gram that will be written is called crocobot-switch.bas and is list-
ed in Program 6.1. Enter the program into your favorite text edi-
tor, then compile and program the PIC 16F84 using the crocobot-
switch.hex file listed in Program 6.2. Insert the PIC into the 18-pin
socket on the main board. Move the legs by hand so that the limit
switches are not triggered, and then turn on the power. The robot
should make a start-up sound and then go silent. If tones are
being produced without the switch being pushed, then turn the
power off. Make sure that the polarity of JP2 is correct, with 5
239