
Page 436 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 436
Decisional architecture C HAPTER 14.2
Fig. 14.2-4 TCA architecture implemented for the AMBLER legged robot (Simmons).
action and perception (like in reactive approaches). (1992) is composed of the three layers (see Fig. 14.2-6),
A motor schema specifies a generic behaviour which can be associated with three levels of discretization of the robot
instantiated under some conditions, for generating a par- state space and of the time. The lower layer (Servo)
ticular type of robot motion (e.g. moving along a straight operates using continuous space and time representations
line, moving towards a goal position, or avoiding a given for controlling the robot and the sensing functions. The
obstacle); each motor schema is associated to a perceptive intermediate layer (Subsumption) works using a contin-
schema (action-oriented perception) in charge of providing uous time representation and a discrete state space
the required information. model for generating specialized behaviours (e.g. wall
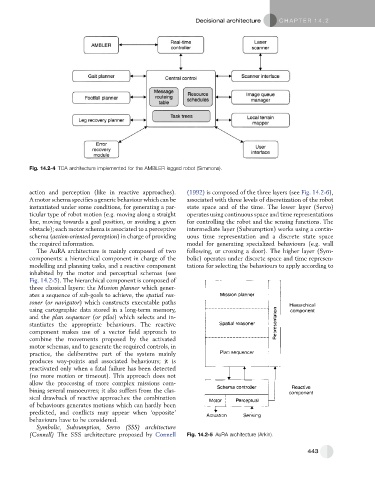
The AuRA architecture is mainly composed of two following, or crossing a door). The higher layer (Sym-
components: a hierarchical component in charge of the bolic) operates under discrete space and time represen-
modelling and planning tasks, and a reactive component tations for selecting the behaviours to apply according to
inhabited by the motor and perceptual schemas (see
Fig. 14.2-5). The hierarchical component is composed of
three classical layers: the Mission planner which gener-
ates a sequence of sub-goals to achieve, the spatial rea-
soner (or navigator) which constructs executable paths
using cartographic data stored in a long-term memory,
and the plan sequencer (or pilot) which selects and in-
stantiates the appropriate behaviours. The reactive
component makes use of a vector field approach to
combine the movements proposed by the activated
motor schemas, and to generate the required controls, in
practice, the deliberative part of the system mainly
produces way-points and associated behaviours; it is
reactivated only when a fatal failure has been detected
(no more motion or timeout). This approach does not
allow the processing of more complex missions com-
bining several manoeuvres; it also suffers from the clas-
sical drawback of reactive approaches: the combination
of behaviours generates motions which can hardly been
predicted, and conflicts may appear when ‘opposite’
behaviours have to be considered.
Symbolic, Subsumption, Servo (SSS) architecture
(Connell) The SSS architecture proposed by Connell Fig. 14.2-5 AuRA architecture (Arkin).
443