
Page 438 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 438
Decisional architecture C HAPTER 14.2
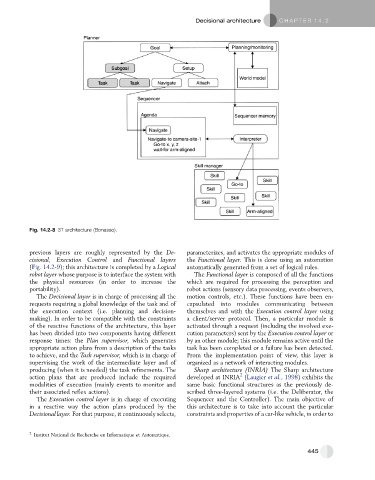
Fig. 14.2-8 3T architecture (Bonasso).
previous layers are roughly represented by the De- parameterizes, and activates the appropriate modules of
cisional, Execution Control and Functional layers the Functional layer. This is done using an automation
(Fig. 14.2-9); this architecture is completed by a Logical automatically generated from a set of logical rules.
robot layer whose purpose is to interface the system with The Functional layer is composed of all the functions
the physical resources (in order to increase the which are required for processing the perception and
portability). robot actions (sensory data processing, events observers,
The Decisional layer is in charge of processing all the motion controls, etc.). These functions have been en-
requests requiring a global knowledge of the task and of capsulated into modules communicating between
the execution context (i.e. planning and decision- themselves and with the Execution control layer using
making). In order to be compatible with the constraints a client/server protocol. Then, a particular module is
of the reactive functions of the architecture, this layer activated through a request (including the involved exe-
has been divided into two components having different cution parameters) sent by the Execution control layer or
response times: the Plan supervisor, which generates by an other module; this module remains active until the
appropriate action plans from a description of the tasks task has been completed or a failure has been detected.
to achieve, and the Task supervisor, which is in charge of From the implementation point of view, this layer is
supervising the work of the intermediate layer and of organized as a network of interacting modules.
producing (when it is needed) the task refinements. The Sharp architecture (INRIA) The Sharp architecture
2
action plans that are produced include the required developed at INRIA (Laugier et al., 1998) exhibits the
modalities of execution (mainly events to monitor and same basic functional structures as the previously de-
their associated reflex actions). scribed three-layered systems (i.e. the Deliberator, the
The Execution control layer is in charge of executing Sequencer and the Controller). The main objective of
in a reactive way the action plans produced by the this architecture is to take into account the particular
Decisionallayer. For that purpose, it continuously selects, constraints and properties of a car-like vehicle, in order to
2
Institut National de Recherche en Informatique et Automatique.
445