
Page 520 - Automotive Engineering Powertrain Chassis System and Vehicle Body
P. 520
Terminology and overview of vehicle structure types C HAPTER 16.1
Fig. 16.1-2 Open section ladder frame chassis of the 1920s (courtesy of Vauxhall Archive Centre).
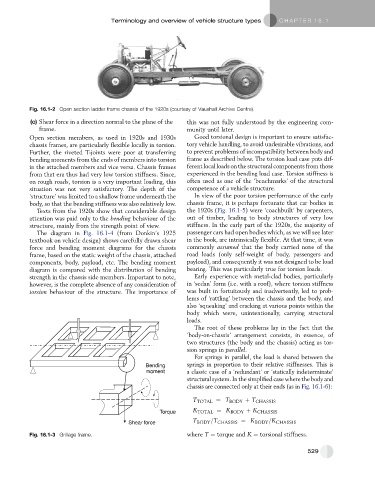
(c) Shear force in a direction normal to the plane of the this was not fully understood by the engineering com-
frame. munity until later.
Open section members, as used in 1920s and 1930s Good torsional design is important to ensure satisfac-
chassis frames, are particularly flexible locally in torsion. tory vehicle handling, to avoid undesirable vibrations, and
Further, the riveted T-joints were poor at transferring to prevent problems of incompatibility between body and
bending moments from the ends of members into torsion frame as described below. The torsion load case puts dif-
in the attached members and vice versa. Chassis frames ferent local loads on the structural components from those
from that era thus had very low torsion stiffness. Since, experienced in the bending load case. Torsion stiffness is
on rough roads, torsion is a very important loading, this often used as one of the ‘benchmarks’ of the structural
situation was not very satisfactory. The depth of the competence of a vehicle structure.
‘structure’ was limited to a shallow frame underneath the In view of the poor torsion performance of the early
body, so that the bending stiffness was also relatively low. chassis frame, it is perhaps fortunate that car bodies in
Texts from the 1920s show that considerable design the 1920s (Fig. 16.1-5) were ‘coachbuilt’ by carpenters,
attention was paid only to the bending behaviour of the out of timber, leading to body structures of very low
structure, mainly from the strength point of view. stiffness. In the early part of the 1920s, the majority of
The diagram in Fig. 16.1-4 (from Donkin’s 1925 passenger cars had open bodies which, as we will see later
textbook on vehicle design) shows carefully drawn shear in the book, are intrinsically flexible. At that time, it was
force and bending moment diagrams for the chassis commonly assumed that the body carried none of the
frame, based on the static weight of the chassis, attached road loads (only self-weight of body, passengers and
components, body, payload, etc. The bending moment payload), and consequently it was not designed to be load
diagram is compared with the distribution of bending bearing. This was particularly true for torsion loads.
strength in the chassis side members. Important to note, Early experience with metal-clad bodies, particularly
however, is the complete absence of any consideration of in ‘sedan’ form (i.e. with a roof), where torsion stiffness
torsion behaviour of the structure. The importance of was built in fortuitously and inadvertently, led to prob-
lems of ‘rattling’ between the chassis and the body, and
also ‘squeaking’ and cracking at various points within the
body which were, unintentionally, carrying structural
loads.
The root of these problems lay in the fact that the
‘body-on-chassis’ arrangement consists, in essence, of
two structures (the body and the chassis) acting as tor-
sion springs in parallel.
For springs in parallel, the load is shared between the
Bending springs in proportion to their relative stiffnesses. This is
moment a classic case of a ‘redundant’ or ‘statically indeterminate’
structural system. In the simplified case where the body and
chassis are connected only at their ends (as in Fig. 16.1-6):
T TOTAL ¼ T BODY þ T CHASSIS
Torque K TOTAL ¼ K BODY þ K CHASSIS
T BODY =T ¼ K BODY =K
Shear force CHASSIS CHASSIS
Fig. 16.1-3 Grillage frame. where T ¼ torque and K ¼ torsional stiffness.
529