
Page 361 - Autonomous Mobile Robots
P. 361
Map Building and SLAM Algorithms 351
(a) 4
3
2
B
1 P
A x y
y
x
0 x
y R
– 1
S
– 2
0 1 2 3 4 5 6
(b) 4
3
2
1
y
0 x
x
y
– 1
– 2
0 1 2 3 4 5 6
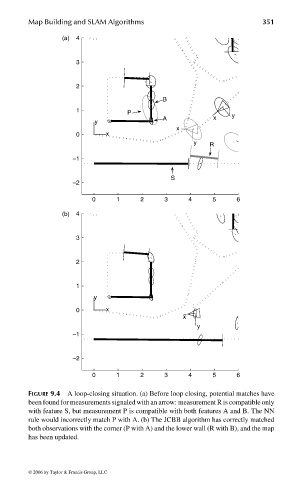
FIGURE 9.4 A loop-closing situation. (a) Before loop closing, potential matches have
been found for measurements signaled with an arrow: measurement R is compatible only
with feature S, but measurement P is compatible with both features A and B. The NN
rule would incorrectly match P with A. (b) The JCBB algorithm has correctly matched
both observations with the corner (P with A) and the lower wall (R with B), and the map
has been updated.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c009” — 2006/3/31 — 16:43 — page 351 — #21