
Page 362 - Autonomous Mobile Robots
P. 362
352 Autonomous Mobile Robots
(a)
6
4
2
y
0 x
– 2
– 4
– 6
– 6 – 4 – 2 0 2 4 6 8 10
(b)
6
4
2
0
– 2
– 4
– 6
– 6 – 4 – 2 0 2 4 6 8 10
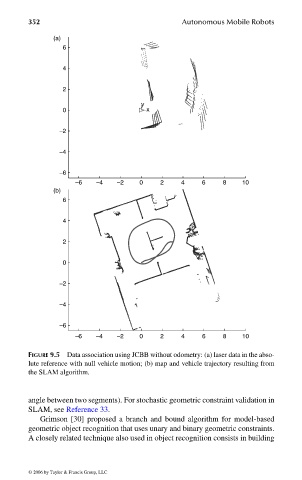
FIGURE 9.5 Data association using JCBB without odometry: (a) laser data in the abso-
lute reference with null vehicle motion; (b) map and vehicle trajectory resulting from
the SLAM algorithm.
angle between two segments). For stochastic geometric constraint validation in
SLAM, see Reference 33.
Grimson [30] proposed a branch and bound algorithm for model-based
geometric object recognition that uses unary and binary geometric constraints.
A closely related technique also used in object recognition consists in building
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c009” — 2006/3/31 — 16:43 — page 352 — #22