
Page 366 - Autonomous Mobile Robots
P. 366
356 Autonomous Mobile Robots
(a) 0
10
20
30
40
50
60
70
80
90
100
0 10 20 30 40 50 60 70 80 90 100
(b) 1
20 0.9
40 0.8
60 0.7
80 0.6
100 0.5
120 0.4
140 0.3
160 0.2
180 0.1
0 20 40 60 80 100 120 140 160 180 200
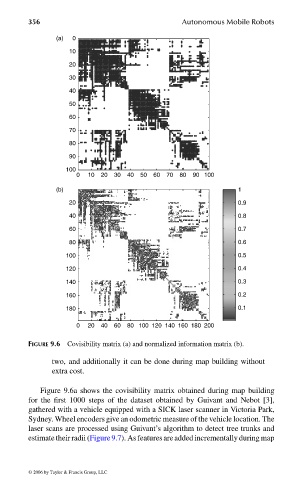
FIGURE 9.6 Covisibility matrix (a) and normalized information matrix (b).
two, and additionally it can be done during map building without
extra cost.
Figure 9.6a shows the covisibility matrix obtained during map building
for the first 1000 steps of the dataset obtained by Guivant and Nebot [3],
gathered with a vehicle equipped with a SICK laser scanner in Victoria Park,
Sydney. Wheel encoders give an odometric measure of the vehicle location. The
laser scans are processed using Guivant’s algorithm to detect tree trunks and
estimate their radii (Figure 9.7). As features are added incrementally during map
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c009” — 2006/3/31 — 16:43 — page 356 — #26