
Page 85 - Autonomous Mobile Robots
P. 85
68 Autonomous Mobile Robots
(a) 50
Corner reflector RADAR range bin
s=10 m 2 Features detected
40
Features
False alarms Missed detection
30
Adaptive threshold
Power (dB) 10
20
0
–10
–20
0 20 40 60 80 100 120 140 160 180 200
Range (m)
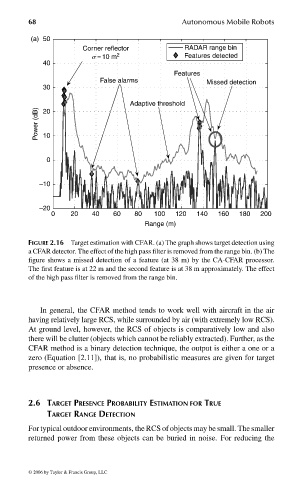
FIGURE 2.16 Target estimation with CFAR. (a) The graph shows target detection using
a CFAR detector. The effect of the high pass filter is removed from the range bin. (b) The
figure shows a missed detection of a feature (at 38 m) by the CA-CFAR processor.
The first feature is at 22 m and the second feature is at 38 m approximately. The effect
of the high pass filter is removed from the range bin.
In general, the CFAR method tends to work well with aircraft in the air
having relatively large RCS, while surrounded by air (with extremely low RCS).
At ground level, however, the RCS of objects is comparatively low and also
there will be clutter (objects which cannot be reliably extracted). Further, as the
CFAR method is a binary detection technique, the output is either a one or a
zero (Equation [2.11]), that is, no probabilistic measures are given for target
presence or absence.
2.6 TARGET PRESENCE PROBABILITY ESTIMATION FOR TRUE
TARGET RANGE DETECTION
For typical outdoor environments, the RCS of objects may be small. The smaller
returned power from these objects can be buried in noise. For reducing the
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c002” — 2006/3/31 — 17:29 — page 68 — #28