
Page 83 - Autonomous Mobile Robots
P. 83
66 Autonomous Mobile Robots
(a) 100
RADAR range bin
Features detected
80
Adaptive threshold
60
Power (dB) 40
20
0
–20
0 20 40 60 80 100 120 140 160 180 200
Range (m)
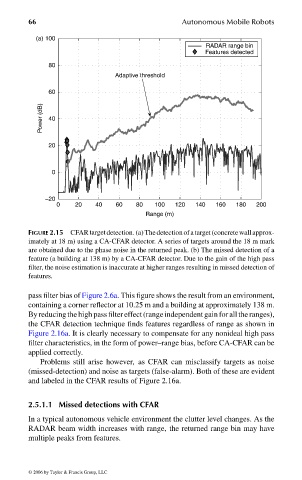
FIGURE 2.15 CFAR target detection. (a)The detection ofatarget(concrete wallapprox-
imately at 18 m) using a CA-CFAR detector. A series of targets around the 18 m mark
are obtained due to the phase noise in the returned peak. (b) The missed detection of a
feature (a building at 138 m) by a CA-CFAR detector. Due to the gain of the high pass
filter, the noise estimation is inaccurate at higher ranges resulting in missed detection of
features.
pass filter bias of Figure 2.6a. This figure shows the result from an environment,
containing a corner reflector at 10.25 m and a building at approximately 138 m.
Byreducingthehighpassfiltereffect(rangeindependentgainforalltheranges),
the CFAR detection technique finds features regardless of range as shown in
Figure 2.16a. It is clearly necessary to compensate for any nonideal high pass
filter characteristics, in the form of power–range bias, before CA-CFAR can be
applied correctly.
Problems still arise however, as CFAR can misclassify targets as noise
(missed-detection) and noise as targets (false-alarm). Both of these are evident
and labeled in the CFAR results of Figure 2.16a.
2.5.1.1 Missed detections with CFAR
In a typical autonomous vehicle environment the clutter level changes. As the
RADAR beam width increases with range, the returned range bin may have
multiple peaks from features.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c002” — 2006/3/31 — 17:29 — page 66 — #26