
Page 86 - Autonomous Mobile Robots
P. 86
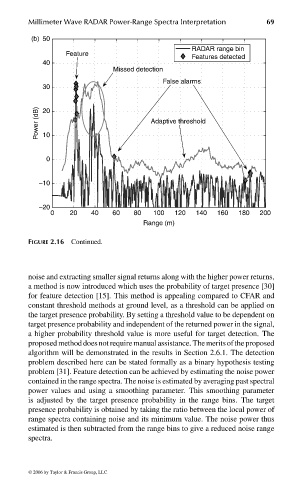
Millimeter Wave RADAR Power-Range Spectra Interpretation 69
(b) 50
RADAR range bin
Feature
Features detected
40
Missed detection
False alarms
30
Power (dB) 20 Adaptive threshold
10
0
–10
–20
0 20 40 60 80 100 120 140 160 180 200
Range (m)
FIGURE 2.16 Continued.
noise and extracting smaller signal returns along with the higher power returns,
a method is now introduced which uses the probability of target presence [30]
for feature detection [15]. This method is appealing compared to CFAR and
constant threshold methods at ground level, as a threshold can be applied on
the target presence probability. By setting a threshold value to be dependent on
target presence probability and independent of the returned power in the signal,
a higher probability threshold value is more useful for target detection. The
proposedmethoddoesnotrequiremanualassistance. Themeritsoftheproposed
algorithm will be demonstrated in the results in Section 2.6.1. The detection
problem described here can be stated formally as a binary hypothesis testing
problem [31]. Feature detection can be achieved by estimating the noise power
contained in the range spectra. The noise is estimated by averaging past spectral
power values and using a smoothing parameter. This smoothing parameter
is adjusted by the target presence probability in the range bins. The target
presence probability is obtained by taking the ratio between the local power of
range spectra containing noise and its minimum value. The noise power thus
estimated is then subtracted from the range bins to give a reduced noise range
spectra.
© 2006 by Taylor & Francis Group, LLC
FRANKL: “dk6033_c002” — 2006/3/31 — 17:29 — page 69 — #29