
Page 35 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 35
12 BIOMEDICAL SYSTEMS ANALYSIS
Mitral Left Aortic
Left
valve ventricle valve
atrium
R a L a R V L V
From R To
pulmonary V1 aorta
veins C a
L V1
R V2 C V1
L V2
Atrial R V3 C V2
pumping
signals L V3
C V3 Ventricular
pumping
signals
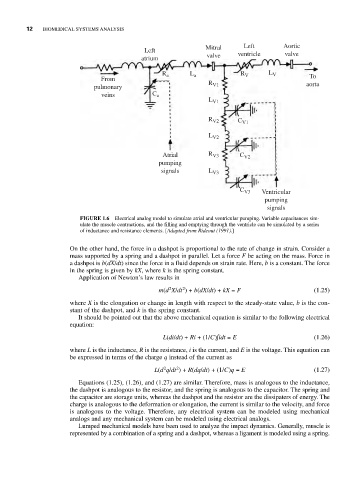
FIGURE 1.6 Electrical analog model to simulate atrial and ventricular pumping. Variable capacitances sim-
ulate the muscle contractions, and the filling and emptying through the ventricle can be simulated by a series
of inductance and resistance elements. [Adapted from Rideout (1991).]
On the other hand, the force in a dashpot is proportional to the rate of change in strain. Consider a
mass supported by a spring and a dashpot in parallel. Let a force F be acting on the mass. Force in
a dashpot is b(dX/dt) since the force in a fluid depends on strain rate. Here, b is a constant. The force
in the spring is given by kX, where k is the spring constant.
Application of Newton’s law results in
2
2
m(d X/dt ) + b(dX/dt) + kX = F (1.25)
where X is the elongation or change in length with respect to the steady-state value, b is the con-
stant of the dashpot, and k is the spring constant.
It should be pointed out that the above mechanical equation is similar to the following electrical
equation:
L(di/dt) + Ri + (1/C)∫idt = E (1.26)
where L is the inductance, R is the resistance, i is the current, and E is the voltage. This equation can
be expressed in terms of the charge q instead of the current as
2
2
L(d q/dt ) + R(dq/dt) + (1/C)q = E (1.27)
Equations (1.25), (1.26), and (1.27) are similar. Therefore, mass is analogous to the inductance,
the dashpot is analogous to the resistor, and the spring is analogous to the capacitor. The spring and
the capacitor are storage units, whereas the dashpot and the resistor are the dissipaters of energy. The
charge is analogous to the deformation or elongation, the current is similar to the velocity, and force
is analogous to the voltage. Therefore, any electrical system can be modeled using mechanical
analogs and any mechanical system can be modeled using electrical analogs.
Lumped mechanical models have been used to analyze the impact dynamics. Generally, muscle is
represented by a combination of a spring and a dashpot, whereas a ligament is modeled using a spring.