
Page 36 - Biomedical Engineering and Design Handbook Volume 1, Fundamentals
P. 36
MODELING OF BIOMEDICAL SYSTEMS 13
m 1 Head
m 1 8.25 kg
c 1 k 1 m 2 8.05 kg
m 3 44.85 kg
m 4 13.86 kg
k ∗ m 5 5 kg
1
m 2 m 4 k 1 22 × 10 N·m –1
8
4
c 2 k 2 c k 4 k 20.13 × 10 N·m –1
2
4
3
k 3 88.56 × 10 N·m –1
3
k 36.47 × 10 N·m –1
4
k ∗ k 4 ∗ k 22.2 × 10 N·m –1
4
2
5
7
k ∗ 36 × 10 N·m –1
1
9
k ∗ 65 × 10 N·m –1
2
4
k ∗ 52.34 × 10 N·m –1
3
3
m 3 k ∗ 69.30 × 10 N·m –1
4
c 1 748.1 N·s·m –1
c 2 578.0 N·s·m –1
c 3 2964.0 N·s·m –1
c 3 k 3 c 4 901.8 N·s·m –1
c 5 84 N·s·m –1
∗
k 3
m 5 Plate
c k 5
5
Floor
Actuator
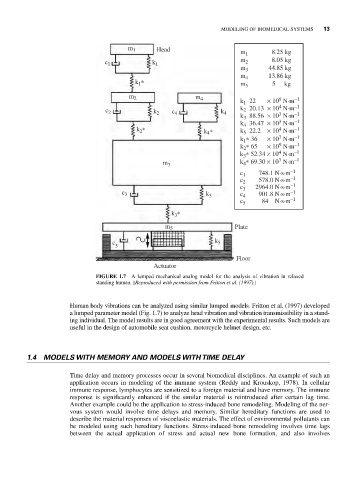
FIGURE 1.7 A lumped mechanical analog model for the analysis of vibration in relaxed
standing human. [Reproduced with permission from Fritton et al. (1997).]
Human body vibrations can be analyzed using similar lumped models. Fritton et al. (1997) developed
a lumped parameter model (Fig. 1.7) to analyze head vibration and vibration transmissibility in a stand-
ing individual. The model results are in good agreement with the experimental results. Such models are
useful in the design of automobile seat cushion, motorcycle helmet design, etc.
1.4 MODELS WITH MEMORY AND MODELS WITH TIME DELAY
Time delay and memory processes occur in several biomedical disciplines. An example of such an
application occurs in modeling of the immune system (Reddy and Krouskop, 1978). In cellular
immune response, lymphocytes are sensitized to a foreign material and have memory. The immune
response is significantly enhanced if the similar material is reintroduced after certain lag time.
Another example could be the application to stress-induced bone remodeling. Modeling of the ner-
vous system would involve time delays and memory. Similar hereditary functions are used to
describe the material responses of viscoelastic materials. The effect of environmental pollutants can
be modeled using such hereditary functions. Stress-induced bone remodeling involves time lags
between the actual application of stress and actual new bone formation, and also involves