
Page 227 - Biomimetics : Biologically Inspired Technologies
P. 227
Bar-Cohen : Biomimetics: Biologically Inspired Technologies DK3163_c007 Final Proof page 213 21.9.2005 11:41am
Bio-Nanorobotics 213
(a) (b)
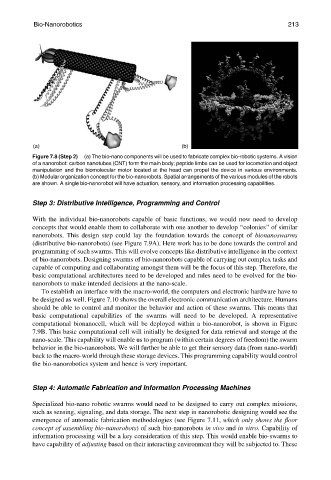
Figure 7.8 (Step 2) (a) The bio-nano components will be used to fabricate complex bio-robotic systems. A vision
of a nanorobot: carbon nanotubes (CNT) form the main body; peptide limbs can be used for locomotion and object
manipulation and the biomolecular motor located at the head can propel the device in various environments.
(b) Modular organization concept for the bio-nanorobots. Spatial arrangements of the various modules of the robots
are shown. A single bio-nanorobot will have actuation, sensory, and information processing capabilities.
Step 3: Distributive Intelligence, Programming and Control
With the individual bio-nanorobots capable of basic functions, we would now need to develop
concepts that would enable them to collaborate with one another to develop ‘‘colonies’’ of similar
nanorobots. This design step could lay the foundation towards the concept of bionanoswarms
(distributive bio-nanorobots) (see Figure 7.9A). Here work has to be done towards the control and
programming of such swarms. This will evolve concepts like distributive intelligence in the context
of bio-nanorobots. Designing swarms of bio-nanorobots capable of carrying out complex tasks and
capable of computing and collaborating amongst them will be the focus of this step. Therefore, the
basic computational architectures need to be developed and rules need to be evolved for the bio-
nanorobots to make intended decisions at the nano-scale.
To establish an interface with the macro-world, the computers and electronic hardware have to
be designed as well. Figure 7.10 shows the overall electronic communication architecture. Humans
should be able to control and monitor the behavior and action of these swarms. This means that
basic computational capabilities of the swarms will need to be developed. A representative
computational bionanocell, which will be deployed within a bio-nanorobot, is shown in Figure
7.9B. This basic computational cell will initially be designed for data retrieval and storage at the
nano-scale. This capability will enable us to program (within certain degrees of freedom) the swarm
behavior in the bio-nanorobots. We will further be able to get their sensory data (from nano-world)
back to the macro-world through these storage devices. This programming capability would control
the bio-nanorobotics system and hence is very important.
Step 4: Automatic Fabrication and Information Processing Machines
Specialized bio-nano robotic swarms would need to be designed to carry out complex missions,
such as sensing, signaling, and data storage. The next step in nanorobotic designing would see the
emergence of automatic fabrication methodologies (see Figure 7.11, which only shows the floor
concept of assembling bio-nanorobots) of such bio-nanorobots in vivo and in vitro. Capability of
information processing will be a key consideration of this step. This would enable bio-swarms to
have capability of adjusting based on their interacting environment they will be subjected to. These