
Page 158 - Build Your Own Combat Robot
P. 158
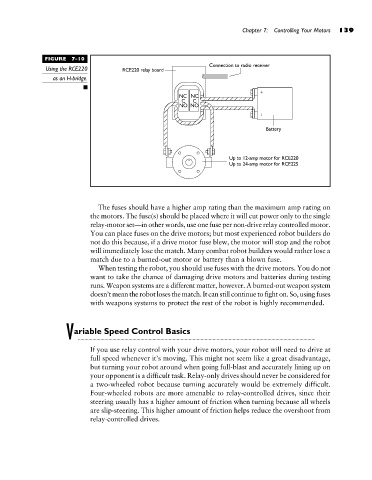
FIGURE 7-10 Chapter 7: Controlling Your Motors 139
Using the RCE220
as an H-bridge.
The fuses should have a higher amp rating than the maximum amp rating on
the motors. The fuse(s) should be placed where it will cut power only to the single
relay-motor set—in other words, use one fuse per non-drive relay controlled motor.
You can place fuses on the drive motors; but most experienced robot builders do
not do this because, if a drive motor fuse blew, the motor will stop and the robot
will immediately lose the match. Many combat robot builders would rather lose a
match due to a burned-out motor or battery than a blown fuse.
When testing the robot, you should use fuses with the drive motors. You do not
want to take the chance of damaging drive motors and batteries during testing
runs. Weapon systems are a different matter, however. A burned-out weapon system
doesn’t mean the robot loses the match. It can still continue to fight on. So, using fuses
with weapons systems to protect the rest of the robot is highly recommended.
V ariable Speed Control Basics
If you use relay control with your drive motors, your robot will need to drive at
full speed whenever it’s moving. This might not seem like a great disadvantage,
but turning your robot around when going full-blast and accurately lining up on
your opponent is a difficult task. Relay-only drives should never be considered for
a two-wheeled robot because turning accurately would be extremely difficult.
Four-wheeled robots are more amenable to relay-controlled drives, since their
steering usually has a higher amount of friction when turning because all wheels
are slip-steering. This higher amount of friction helps reduce the overshoot from
relay-controlled drives.