
Page 120 - Build Your Own Quadcopter_ Power Up Your Designs with the Parallax Elev-8
P. 120
Chapter 5: Quadcopter Propulsors 99
rotating
Figure 5.7 Stop-action screenshot of a rotating, animated BLDC.
I would also suggest going to the website http://www.aerodesign.de/peter/2001/
LRK350/LRK_in_action.gif, if you wish to see the animation of a BLDC in action.
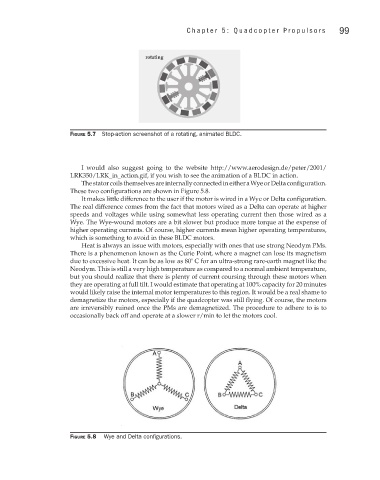
The stator coils themselves are internally connected in either a Wye or Delta configuration.
These two configurations are shown in Figure 5.8.
It makes little difference to the user if the motor is wired in a Wye or Delta configuration.
The real difference comes from the fact that motors wired as a Delta can operate at higher
speeds and voltages while using somewhat less operating current then those wired as a
Wye. The Wye-wound motors are a bit slower but produce more torque at the expense of
higher operating currents. Of course, higher currents mean higher operating temperatures,
which is something to avoid in these BLDC motors.
Heat is always an issue with motors, especially with ones that use strong Neodym PMs.
There is a phenomenon known as the Curie Point, where a magnet can lose its magnetism
due to excessive heat. It can be as low as 80° C for an ultra-strong rare-earth magnet like the
Neodym. This is still a very high temperature as compared to a normal ambient temperature,
but you should realize that there is plenty of current coursing through these motors when
they are operating at full tilt. I would estimate that operating at 100% capacity for 20 minutes
would likely raise the internal motor temperatures to this region. It would be a real shame to
demagnetize the motors, especially if the quadcopter was still flying. Of course, the motors
are irreversibly ruined once the PMs are demagnetized. The procedure to adhere to is to
occasionally back off and operate at a slower r/min to let the motors cool.
Figure 5.8 Wye and Delta configurations.