
Page 127 - Build Your Own Quadcopter_ Power Up Your Designs with the Parallax Elev-8
P. 127
106 Bu il d Y o ur O w n Q u a d c o p t e r
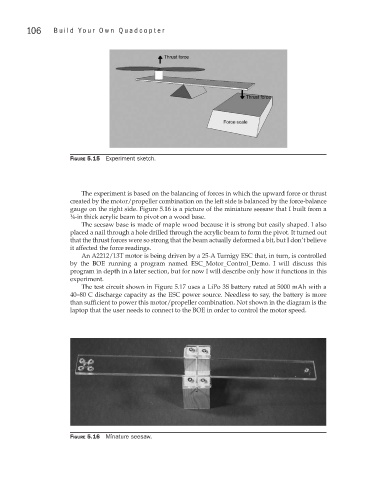
Figure 5.15 Experiment sketch.
The experiment is based on the balancing of forces in which the upward force or thrust
created by the motor/propeller combination on the left side is balanced by the force-balance
gauge on the right side. Figure 5.16 is a picture of the miniature seesaw that I built from a
¼-in thick acrylic beam to pivot on a wood base.
The seesaw base is made of maple wood because it is strong but easily shaped. I also
placed a nail through a hole drilled through the acrylic beam to form the pivot. It turned out
that the thrust forces were so strong that the beam actually deformed a bit, but I don’t believe
it affected the force readings.
An A2212/13T motor is being driven by a 25-A Turnigy ESC that, in turn, is controlled
by the BOE running a program named ESC_Motor_Control_Demo. I will discuss this
program in depth in a later section, but for now I will describe only how it functions in this
experiment.
The test circuit shown in Figure 5.17 uses a LiPo 3S battery rated at 5000 mAh with a
40–80 C discharge capacity as the ESC power source. Needless to say, the battery is more
than sufficient to power this motor/propeller combination. Not shown in the diagram is the
laptop that the user needs to connect to the BOE in order to control the motor speed.
Figure 5.16 Minature seesaw.