
Page 494 - Cam Design Handbook
P. 494
THB14 9/19/03 7:58 PM Page 482
482 CAM DESIGN HANDBOOK
to indexing dials, carriers, conveyors, feeding mechanisms, and others. The function of
these devices is to convert a continuous motion to an intermittent motion.
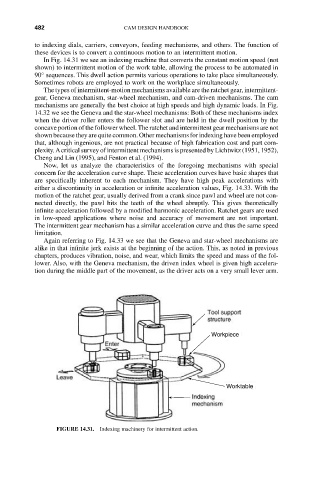
In Fig. 14.31 we see an indexing machine that converts the constant motion speed (not
shown) to intermittent motion of the work table, allowing the process to be automated in
90° sequences. This dwell action permits various operations to take place simultaneously.
Sometimes robots are employed to work on the workplace simultaneously.
The types of intermittent-motion mechanisms available are the ratchet gear, intermittent-
gear, Geneva mechanism, star-wheel mechanism, and cam-driven mechanisms. The cam
mechanisms are generally the best choice at high speeds and high dynamic loads. In Fig.
14.32 we see the Geneva and the star-wheel mechanisms: Both of these mechanisms index
when the driver roller enters the follower slot and are held in the dwell position by the
concave portion of the follower wheel. The ratchet and intermittent gear mechanisms are not
shown because they are quite common. Other mechanisms for indexing have been employed
that, although ingenious, are not practical because of high fabrication cost and part com-
plexity. Acritical survey of intermittent mechanisms is presented by Lichtwitz (1951, 1952),
Cheng and Lin (1995), and Fenton et al. (1994).
Now, let us analyze the characteristics of the foregoing mechanisms with special
concern for the acceleration curve shape. These acceleration curves have basic shapes that
are specifically inherent to each mechanism. They have high peak accelerations with
either a discontinuity in acceleration or infinite acceleration values, Fig. 14.33. With the
motion of the ratchet gear, usually derived from a crank since pawl and wheel are not con-
nected directly, the pawl hits the teeth of the wheel abruptly. This gives theoretically
infinite acceleration followed by a modified harmonic acceleration. Ratchet gears are used
in low-speed applications where noise and accuracy of movement are not important.
The intermittent gear mechanism has a similar acceleration curve and thus the same speed
limitation.
Again referring to Fig. 14.33 we see that the Geneva and star-wheel mechanisms are
alike in that infinite jerk exists at the beginning of the action. This, as noted in previous
chapters, produces vibration, noise, and wear, which limits the speed and mass of the fol-
lower. Also, with the Geneva mechanism, the driven index wheel is given high accelera-
tion during the middle part of the movement, as the driver acts on a very small lever arm.
Workpiece
Worktable
FIGURE 14.31. Indexing machinery for intermittent action.