
Page 248 -
P. 248
4.4 Additional reading 227
(a) (b) (c)
(d) (e) (f)
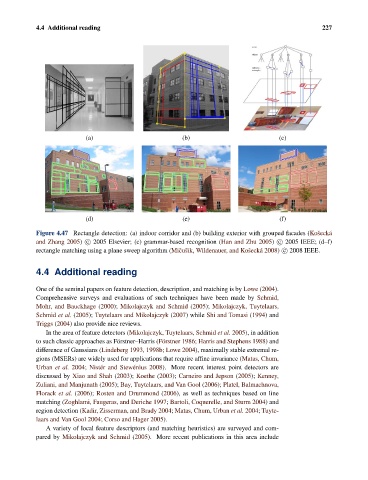
Figure 4.47 Rectangle detection: (a) indoor corridor and (b) building exterior with grouped facades (Koˇ seck´ a
and Zhang 2005) c 2005 Elsevier; (c) grammar-based recognition (Han and Zhu 2005) c 2005 IEEE; (d–f)
rectangle matching using a plane sweep algorithm (Miˇ cuˇ s` ık, Wildenauer, and Koˇ seck´ a 2008) c 2008 IEEE.
4.4 Additional reading
One of the seminal papers on feature detection, description, and matching is by Lowe (2004).
Comprehensive surveys and evaluations of such techniques have been made by Schmid,
Mohr, and Bauckhage (2000); Mikolajczyk and Schmid (2005); Mikolajczyk, Tuytelaars,
Schmid et al. (2005); Tuytelaars and Mikolajczyk (2007) while Shi and Tomasi (1994) and
Triggs (2004) also provide nice reviews.
In the area of feature detectors (Mikolajczyk, Tuytelaars, Schmid et al. 2005), in addition
to such classic approaches as F¨ orstner–Harris (F¨ orstner 1986; Harris and Stephens 1988) and
difference of Gaussians (Lindeberg 1993, 1998b; Lowe 2004), maximally stable extremal re-
gions (MSERs) are widely used for applications that require affine invariance (Matas, Chum,
Urban et al. 2004; Nist´ er and Stew´ enius 2008). More recent interest point detectors are
discussed by Xiao and Shah (2003); Koethe (2003); Carneiro and Jepson (2005); Kenney,
Zuliani, and Manjunath (2005); Bay, Tuytelaars, and Van Gool (2006); Platel, Balmachnova,
Florack et al. (2006); Rosten and Drummond (2006), as well as techniques based on line
matching (Zoghlami, Faugeras, and Deriche 1997; Bartoli, Coquerelle, and Sturm 2004) and
region detection (Kadir, Zisserman, and Brady 2004; Matas, Chum, Urban et al. 2004; Tuyte-
laars and Van Gool 2004; Corso and Hager 2005).
A variety of local feature descriptors (and matching heuristics) are surveyed and com-
pared by Mikolajczyk and Schmid (2005). More recent publications in this area include