
Page 187 - Control Theory in Biomedical Engineering
P. 187
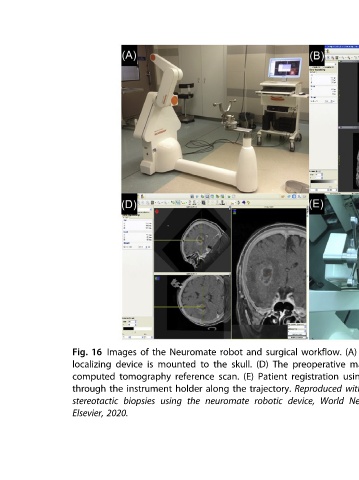
(A) the of base The (C) plan. Trajectory (B) station. planning and Robot the to fused is trajectory the including imaging resonance magnetic needle biopsy the Positioning (F) system. tracking ultrasonic the using frameless 102 with Experience 2019.
workflow. preoperative registration Reproduced World
surgical The Patient trajectory. device, robotic
and (D) (E)
robot skull. the scan. the along neuromate
Neuromate to mounted reference holder the
the using
of is tomography instrument biopsies
Images device the 2020.
16 localizing computed through stereotactic
Fig. Elsevier,