
Page 200 - Control Theory in Biomedical Engineering
P. 200
Medical robotics 181
assist or support weak or ineffective joints, muscles, or limbs. Orthotics often
take the form of an exoskeleton (Najarian et al., 2011). An exoskeleton is a
powered anthropomorphic suit that is worn by the patient having links and
joints that correspond to those of the human and actuators that assist the
patient with moving his or her limb or lifting external loads. A prosthetic
is a robotic device that substitutes a missing part of the human body providing
mobility or manipulation abilities when a limb is lost.
6.2 Literature review
The field of rehabilitation and assistive robotics is distinguished by a
comprehensive bibliography marked a number of books (Pons, 2008;
Xie, 2016; Bai et al., 2018) and a large number of survey papers (Krebs
et al., 1998; Tejima, 2001; Dellon and Matsuoka, 2007; Pignolo, 2009;
Pons, 2010; Dı ´az et al., 2011; Heo et al., 2012; Poli et al., 2013; Masiero
et al., 2014; Dzahir and Yamamoto, 2014; Maciejasz et al., 2014;
Yang et al., 2017b; Qian and Bi, 2015; Gassert and Dietz, 2018; Shishehgar
et al., 2018; Aggogeri et al., 2019; Shi et al., 2019; Pamungkas et al., 2019).
A number of book chapters (Van der Loos and Reinkensmeyer, 2008;
Zhang et al., 2017; Krebs and Volpe, 2013; Van der Loos et al., 2016) is also
available.
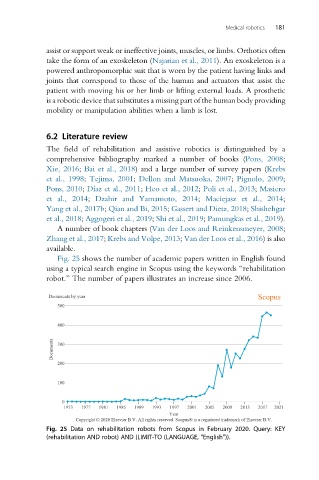
Fig. 25 shows the number of academic papers written in English found
using a typical search engine in Scopus using the keywords “rehabilitation
robot.” The number of papers illustrates an increase since 2006.
Fig. 25 Data on rehabilitation robots from Scopus in February 2020. Query: KEY
(rehabilitation AND robot) AND (LIMIT-TO (LANGUAGE, "English”)).