
Page 203 - Control Theory in Biomedical Engineering
P. 203
184 Control theory in biomedical engineering
(A) (B) (C)
(D) (E) (F)
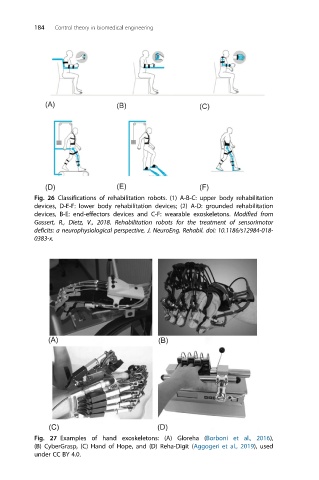
Fig. 26 Classifications of rehabilitation robots. (1) A-B-C: upper body rehabilitation
devices, D-E-F: lower body rehabilitation devices; (2) A-D: grounded rehabilitation
devices, B-E: end-effectors devices and C-F: wearable exoskeletons. Modified from
Gassert, R., Dietz, V., 2018. Rehabilitation robots for the treatment of sensorimotor
deficits: a neurophysiological perspective, J. NeuroEng. Rehabil. doi: 10.1186/s12984-018-
0383-x.
Fig. 27 Examples of hand exoskeletons: (A) Gloreha (Borboni et al., 2016),
(B) CyberGrasp, (C) Hand of Hope, and (D) Reha-Digit (Aggogeri et al., 2019), used
under CC BY 4.0.